Dr. Michael Greenspan, PhD, PEng
Professor & Laboratory Director
Contact Information
• michael.greenspan@queensu.ca
• (613) 533-6000 x77736
• Room 514, Walter Light Hall
Our Research Vision
The Robotics and Computer Vision Laboratory, part of the Ingenuity Labs Research Institute, focuses on advancing computer vision systems with particular emphasis on machine learning based pose estimation for robotic applications.
As part of Ingenuity Labs' interdisciplinary initiative combining Artificial Intelligence, Robotics, and Human-Machine Interaction, we contribute to creating intelligent systems that enhance human productivity, safety, and quality of life.
Our collaborative research program works with industry partners and researchers worldwide, addressing both industrially-motivated problems and fundamental questions in 6DoF pose estimation, robotic grasping and bin picking, 3D range sensor development, and prediction within mobile urban video.
Current Research
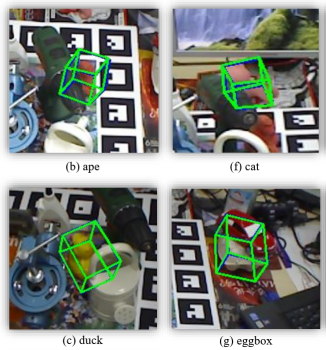
6DoF pose estimation
Novel methods for 6DoF pose estimation from RGB-D images. These techniques aim to improve accuracy and robustness, especially for objects that are occluded or symmetric, using approaches such as keypoint voting schemes or a combination of sparse keypoint accuracy with dense pixel-wise predictions. This focus on more precise distance estimation allows for better 3D object frame surface estimates and more stable keypoint representations, ultimately leading to improved pose estimation.
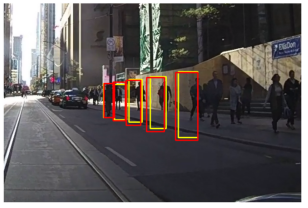
Prediction within mobile urban video
The goal is to develop new methods for motion prediction in urban video analysis. The approach focuses on human motion by learning temporal and spatial dependencies and exploring dynamically correlated body components. Another aim is to predict pedestrian trajectories using a multimodal transformer architecture that takes pedestrian locations and ego-vehicle speeds as input.
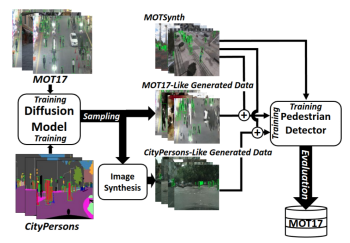
Computer vision and machine learning
We explore fundamental and applied research in computer vision and machine learning, with a focus on developing robust and efficient algorithms for object recognition, scene understanding, and real-time data processing. Our work leverages both deep learning and classical techniques to push the boundaries of what's possible in visual perception, enabling intelligent systems to make sense of the world around them. Topics include domain adaptation, sim2real, continuous learning, federated learning, and long-tailed methods.
3D range sensor development
Innovative techniques to create high-speed, real-time range sensors using projector-camera systems. These systems are designed to overcome the limitations of existing structured light methods by either making the pattern projection imperceptible or by significantly improving the efficiency of the depth calculation process.
Explore Our Work
Partners
